porous borders 2019
The starting point for this project was nostalgia, as it might be invoked by some distant memory of a scene viewed through a rainy window. The flow of the water down the screen was used to generate a segmentation map, with colours corresponding to features found in photographs of landscapes.
Image tracking and feature extraction used openCV functions in openFrameworks, the water pump flow rate was controlled by python code on a Raspberry Pi and the cGAN model (SPADE-landscapes) which generated the images was hosted on a local Linux PC in RunwayML.


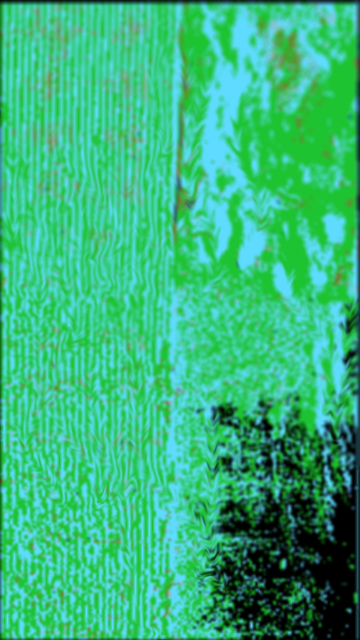
A camera tracks the water flowing down the screen. A segmentation map is created and sent to a neural network trained on images of landscapes. The result is projected back onto the water.